图像中两个像素之间的距离有多种定义方式,图像处理中常用的距离有欧式距离、街区距离和棋盘距离 欧式距离 略 街区距离 两个像素点X方向和Y方向的距离之和。欧式距离表示的是从一个像素点到
图像中两个像素之间的距离有多种定义方式,图像处理中常用的距离有欧式距离、街区距离和棋盘距离
欧式距离 略
两个像素点X方向和Y方向的距离之和。欧式距离表示的是从一个像素点到另一个像素点的最短距离,然而有时我们并不能以两个点之间连线的方向前进,例如在一个城市内两点之间的连线可能存在障碍物的阻碍,因此从一个点到另一个点需要沿着街道行走,因此这种距离的度量方式被称为街区距离。街区距离就是由一个像素点到另一个像素点需要沿着X方向和Y方向一共行走的距离,数学表示形式如式所示。

两个像素点X方向距离和Y方向距离的最大值。与街区距离相似,棋盘距离也是假定两个像素点之间不能够沿着连线方向靠近,像素点只能沿着X方向和Y方向移动,但是棋盘距离并不是表示由一个像素点移动到另一个像素点之间的距离,而是表示两个像素点移动到同一行或者同一列时需要移动的最大距离,数学表示形式如式所示。

CV_EXPORTS_AS(distanceTransfORMWithLabels) void distanceTransform( InputArray src, OutputArray dst,
OutputArray labels, int distanceType, int maskSize,
int labelType = DIST_LABEL_CCOMP );
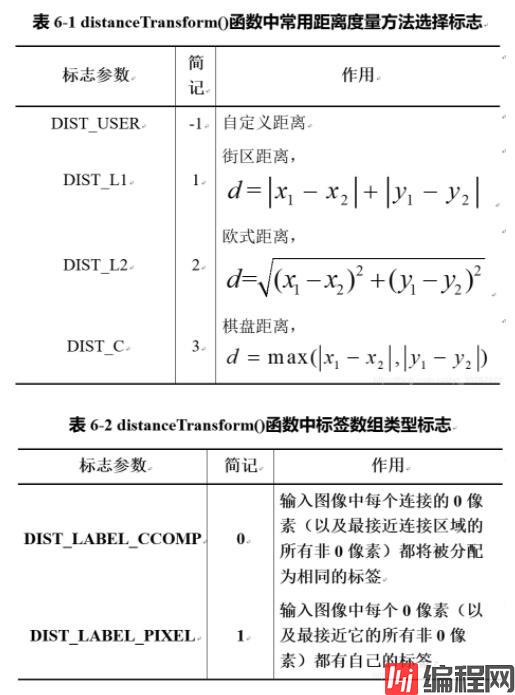
该函数原型在对图像进行距离变换的同时会生成Voronoi图,但是有时只是为了实现对图像的距离变换,并不需要使用Voronoi图,而使用该函数必须要求创建一个Mat类变量用于存放Voronoi图,占用了内存资源,因此distanceTransform()函数的第二种函数原型中取消了生成Voronoi图,只输出距离变换后的图像
void distanceTransform( InputArray src, OutputArray dst,
int distanceType, int maskSize, int dstType=CV_32F); 该函数原型中的主要参数含义与前一种函数原型相同,前两个参数为输入图像和输出图像,第三个参数和为距离变换过程中使用的距离种类。函数中第四个参数是距离变换掩码矩阵的大小,由于街区距离(Dist_L1)和棋盘距离(Dist_C)对掩模尺寸没有要求,因此该参数在选择街区距离和棋盘距离时被强制设置为3,同样掩模尺寸的大小对欧式距离(Dist_L2)计算的精度有影响,为了获取较为精确的时,一般使用5×5的掩模矩阵。函数最后一个参数是输出图像的数据类型,虽然可以在CV_8U和CV_32F两个类型中任意选择,但是图像输出时实际的数据类型与距离变换时选择的距离种类有着密切的联系,CV_8U只能使用在计算街区距离的条件下,当计算欧式距离和棋盘距离时,即使该参数设置为CV_8U,实际的输出图像的数据类型也是CV_32F。
//
// Created by smallflyfly on 2021/6/15.
//
#include "OpenCV2/opencv.hpp"
#include "opencv2/highgui.hpp"
#include "utils.hpp"
#include <iOStream>
using namespace std;
using namespace cv;
int main() {
// 自定义矩阵
Mat a = (Mat_<uchar>(5, 5) <<
1,1,1,1,1,
1,1,1,1,1,
1,1,0,1,1,
1,1,1,1,1,
1,1,1,1,1
);
Mat distL1, distL2, distC;
distanceTransform(a, distL1, DIST_L1, 3, CV_8U);
distanceTransform(a, distL2, DIST_L2, 5, CV_8U);
distanceTransform(a, distC, DIST_C, 3, CV_8U);
cout << distL1 << endl;
cout << distL2 << endl;
cout << distC << endl;
Mat im = imread("test.jpg", IMREAD_GRAYSCALE);
if (im.empty()) {
cerr << "image file read error" << endl;
return -1;
}
resize(im, im, Size(0, 0), 0.5, 0.5);
// 转为二值图像
Mat im1, im2;
threshold(im, im1, 125 ,255, THRESH_BINARY);
threshold(im, im2, 125, 255, THRESH_BINARY_INV);
Mat dist1, dist2;
distanceTransform(im1, dist1, DIST_L1, 3, CV_32F);
distanceTransform(im2, dist2, DIST_L1, 3, CV_8U);
showImage("im1", im1);
showImage("dist1", dist1);
showImage("im2", im2);
showImage("dist2", dist2);
waiTKEy(0);
destroyAllwindows();
return 0;
}--结束END--
本文标题: OpenCV实现图像距离变换
本文链接: https://lsjlt.com/news/128934.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
2024-03-01
2024-03-01
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作

0