作者:Chunzhu Li 在 上篇文章 中,我们主要介绍了 Pump Storage 是如何对 binlog 进行持久化存储、排序、配对的。在文中我们提到 binlog 的持久化键值存储主要是由 valueLog 组件完成的。同时,大家如
作者:Chunzhu Li
在 上篇文章 中,我们主要介绍了 Pump Storage 是如何对 binlog 进行持久化存储、排序、配对的。在文中我们提到 binlog 的持久化键值存储主要是由 valueLog 组件完成的。同时,大家如果在上文点开 writeToValueLog 代码阅读的话会发现在其中还会使用一个 slowChaser 组件。slowChaser 组件主要用于避免在写 kv 环节中 GoLevelDB 写入太慢甚至出现 write paused 时影响 Pump Storage 的执行效率的问题。
接下来,本篇文章重点介绍 valueLog 与 slowChaser 这两个组件。
valueLog 组件的代码位于 pump/storage/vlog.go 中,主要作用是管理磁盘中的所有存放 Binlog Event 的 logFile 文件。Pump 本地 GoLevelDB 中存储的 key value 中,key 用 Binlog 的 StartTs/CommitTs 拼成,value 则只是一个索引,指向 valueLog 中的一条 Binlog 记录。valueLog 的结构体定义如下所示:
type valueLog struct {
buf *bytes.Buffer // buf to write to the current log file
dirPath string
sync bool
maxFid uint32
filesLock sync.RWMutex
filesMap map[uint32]*logFile
opt *Options
}
logFile 文件在 Pump 指定数据目录下会以类似 “000001.log” 的命名保存,其中的 “000001” 即为表示 logFile 文件编号的 Fid。valueLog 中的 maxFid 为文件中最大的 Fid,valueLog 也只会把 binlog 写到 maxFid 的 logFile。 filesMap 中会保存所有的 Fid 编号所对应的 logFile 对象。logFile 包含了单个 logFile 的一些属性和方法,主要包含在 pump/storage/log.go 中。
valueLog 作为持久化 Binlog Event 到 logFiles 的组件,包含了一系列对 logFiles 进行的操作。下面我们来看看其中几个比较重要的方法。
readValue该函数的作用是使用上一篇文章中提到的 valuePointer 在磁盘的 logFiles 中定位到对应的 Binlog Event。该函数会在 Pump 向 Drainer 发 Binlogs 和向 TiKV 查询 Binlog 的提交状态时被用到。
write顾名思义,主要作用是处理 写 binlog 请求,在上一篇文章中提到的 writeToValueLog 被用到,不是并发安全的。为了提高写入效率,write 函数在处理一组写 binlog request 时,会先使用 encodeRecord 函数把将要写入的 binlog event 编码后存入 bufReqs 数组,随后再通过 toDisk 函数写入 logFile 文件。如果要写入的目标 logFile 文件已经很大,则新建并切换到新的 log 文件,同时增大 maxFid。
一个完整的 binlog 文件的编码格式在 log.go 开头注释 中:
一个 binlog 文件中往往包含了多条 record。一条 record 中开头的 16 个字节为 record 头:其中前 4 个字节为表示 record 数据开始的 magic 码;中间 8 个字节保存了该条 record 的长度;最后 4 个字节为 checksum,用于校验。record 头后面紧跟的是单个 binlog event 的二进制编码。这样编码的一大好处是 valueLog 只需要 Offset 参数就能得到 binlog 编码段。
完整的 log 文件尾部还有一个 footer。valueLog 不会向已经有 footer 的 log 文件写入新的 binlog event。footer 的前 8 个字节为该 logFile 中所有 Binlog 的 maxTS,该值可用于后面介绍到的 GC 操作。后 4 个字节为表示文件已结束的 magic 码。
openOrCreateFiles在 Pump Storage 启动时会使用该函数启动 valueLog 组件,初始化 valueLog 的配置信息,读取磁盘的 log 文件并将文档信息导入到 filesMap 中。
在 valueLog 启动时,如果要写入的 logFile 没有 footer,则该函数会使用 scan 方法扫描该 logFile 的所有 binlog,求出 maxTS 更新至内存。因此在关闭 valueLog 时,如果当前文件已经较大,则将文件加上 footer,将内存中的 maxTS 持久化到 footer 以节省下次启动 valueLog 时进行 scan 查询的时间。
scan 与 scanRequests扫描某个 valuePointer 之后的所有在 logFiles 中的 binlog event,并将读到的 binlog event 通过 fn 函数进行对应的处理。Pump Storage 在重启时会使用该函数读取持久化到 vlog 但还没将索引写到 kv 的 binlog event 并 交给 kv 组件处理。为提高效率,scan 只在读取文件列表时加文件锁,读取完毕开始扫描后如果有并发写入的 logFile 则不会被 scan 扫到。
gcTS在 Storage 进行 GC 时使用,前面 write 中提到的 maxTS 即在这里使用。该函数会直接删掉磁盘目录下所有 maxTS 小于 gcTS 的 logFile 以节约磁盘空间。
slowChaser 组件的代码主要位于 pump/storage/chaser.go 中。其结构体定义如下所示:
type slowChaser struct {
on int32
vlog valLogScanner
lastUnreadPtr *valuePointer
recoveryTimeout time.Duration
lastRecoverAttempt time.Time
output chan *request
WriteLock sync.Mutex
}
看到这里,相信大家也一定有个疑问:既然 Pump 已经有了正常写 binlogs 的链路,为什么我们还要再引入 slowChaser 组件呢?
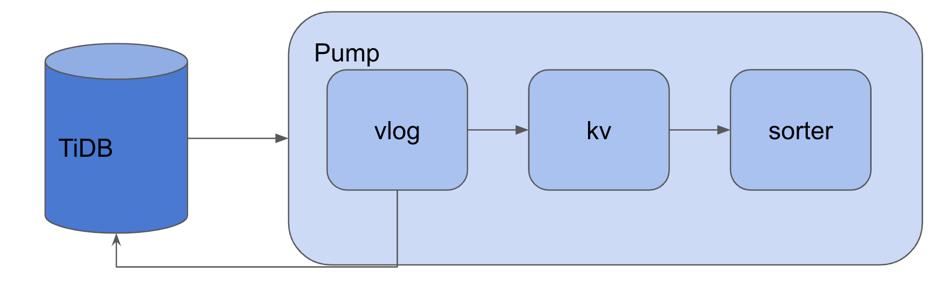
在上篇文章中我们提到,当 Pump Server 收到 binlog 后,会按照 vlog -> kv -> sorter 的顺序传递 binlog,每一条 binlog 都会在上一步写入完成后发送给下一步组件的输入 channel。在 写 kv 时,GoLevelDB 可能会因为执行 compaction 导致写入变慢甚至出现 write paused 现象。此时,当 vlog -> kv channel 装满后,则需要 slowChaser 来处理后续的 binlog 到 kv。
slowChaser 会在调用 writeValueLog 函数的一开始就被实例化,并同时开启线程运行 slowChaser.Run()。但此时 slowChaser 并未开始扫描,只是开始监视 Pump 写 kv 的速度。
开启 slowChaser 的代码位于 writeValueLog。当我们发现向 buffer channel 中写入 request 等待的时间超过 1 秒,slowChaser 便会被开启。同时从该 binlog 开始之后在 writeValueLog 中写入磁盘的 binlog 均不会再再传递进 vlog -> kv 之间的 buffer channel,直到 slowChaser 被关闭为止。
因为 slowChaser 是可能被多次启停的,因此在 slowChaser 的 Run 函数中我们使用 waitUntilTurnedOn 函数每隔 0.5 秒就检查 slowChaser 的启动状态。
slowChaser 在被启动后会使用 catchUp 函数去扫描磁盘目录,从 lastUnreadPtr 即第一个没有被写 kv 的 binlog 的 valuePointer 开始。该值会在启动 slowChaser 时设置为当时的 binlog 对应的 valuePointer,之后会在每次成功写入 kv 后就更新。
有了起始 valuePointer 以后,slowChaser 会使用前文提到的 valueLog 的 scanRequests 方法进行一次扫描。扫描时 chaser 会把扫出的每条 binlog 逐一发给 toKV channel。
在前面介绍了 slowChaser 的作用,但我们应当注意的是 slowChaser 毕竟是一个 “slow” 的组件,是针对写 kv 缓慢的无奈之举,从硬盘中扫描读取 binlog 再写 kv 的操作是必然慢于直接从内存写 kv 的。因此 slowChaser 启动扫描后,我们就应该观察写 kv 的速度是否已经恢复正常,以及在磁盘中的 binlog 是否已经全部写到 kv,从而适时关掉 slowChaser 以提高运行速度。基于此,下面我们将介绍 slowChaser 的 catchUp 与关闭操作,主要涉及 slowChaser.Run() 的 for 循环里的代码。
slowChaser 在每轮运行时会进行至多两次 catchUp 操作:
第一次 catchUp 操作不会使用写锁禁止 valueLog 组件写 logFile 到磁盘。在正常扫描完磁盘中的 binlog 后,chaser 会同时计算本次 catchUp 所花费的时间,如果花费时间较短,说明这可能是个恢复正常运转的好时机。这时 slowChaser 会进入第二次 catchUp 操作,尝试扫完所有 binlog 并关闭 slowChaser。如果本次 catchUp 花费时间过长或者在 1 分钟内进行过第二次的 catchUp 操作则会跳过第二次 catchUp 直接进入下一轮。
第二次 catchUp 会在操作开始前记录本次恢复开始的时间,同时上锁阻止 vlog 写 binlog 到磁盘。如果 catchUp 在 1 秒内完成,此时磁盘中所有 binlog 都已经写到 kv , 则 slowChaser 可以安全地被关闭。如果 catchUp 超时,为避免长时间持锁阻止 vlog 写 binlog 影响性能,slowChaser 将继续进行下一轮的 catchUp。第二次 catchUp 操作结束时不论成败互斥锁都将被释放。
slowChaser 在成功 catch up 之后会被关闭,但不会完全停止运行,只是进入了 “睡眠” 状态,继续不断监视 Pump 写 kv 的速度。一旦 writeValueLog 中再次出现了写 kv 慢的现象,slowChaser.TurnOn 被调用,slowChaser 又会重新启动,开始新的轮次的 catchUp 操作。只有当 writeValueLog 函数退出时,slowChaser 才会真正随之退出并完全停止运行。
本文介绍了 Pump Storage 的两个重要组件 valueLog,slowChaser 的主要功能与具体实现,希望能帮助大家更好地理解 Pump 部分的源码。
至此 TiDB Binlog 源码的 Pump 部分的代码已基本介绍完毕,在下一篇文章中我们将开始介绍 Drainer Server 模块,帮助大家理解 Drainer 是如何启动,维护状态与获取全局 binlog 数据与 Schema 信息的。
原文阅读:https://pingcap.com/blog-cn/tidb-binlog-source-code-reading-6/
--结束END--
本文标题: TiDB Binlog 源码阅读系列文章(六)Pump Storage 介绍(下)
本文链接: https://lsjlt.com/news/2881.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
2024-10-23
2024-10-22
2024-10-22
2024-10-22
2024-10-22
2024-10-22
2024-10-22
2024-10-22
2024-10-22
2024-10-22
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作

0