目录定时器最小堆实现定时器时间轮单层级时间轮多层级时间轮定时器 有些时候我们需要延迟执行一些功能,比如每10s进行一次数据采集。或者告知用户技能冷却有多少时间,如果我们将执行这些功能
有些时候我们需要延迟执行一些功能,比如每10s进行一次数据采集。或者告知用户技能冷却有多少时间,如果我们将执行这些功能的任务交给主线程,就会造成主线程的阻塞。因此我们可以选择一个创建一个子线程,让其检测定时器中的任务,当有任务的时间到了的时候,就去执行这个任务。
定时器可以由很多种数据结构实现,比如最小堆、红黑树、跳表、甚至数组都可以,其本质都是拿到最小时间的任务,然后取出该任务并执行。
综合实现难度和效率来看,最小堆是最容易实现定时器的数据结构。
最小堆主要有以下接口:
#pragma once
#include <vector>
#include <map>
using namespace std;
typedef void (*TimerHandler)(struct Timernode *node);
//获取系统时间,单位是毫秒
static uint32_t current_time()
{
uint32_t t;
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti);
t = (uint32_t)ti.tv_sec * 1000;
t += ti.tv_nsec / 1000000;
return t;
}
struct TimerNode
{
//该任务在最小堆中的下标位置
int idx = 0;
//该任务是第几号任务
int id = 0;
//几毫秒后执行该任务
unsigned int expire = 0;
//回调函数
TimerHandler cb = NULL;
};
class MinHeapTimer
{
public:
MinHeapTimer()
{
_heap.clear();
_map.clear();
}
int Count();
//加入任务,expire为该任务的失效时间,expire过后就要执行回调函数cb
int AddTimer(uint32_t expire, TimerHandler cb);
//删除一个任务
bool DelTimer(int id);
//获取一个任务
void ExpireTimer();
private:
//用于比较两个任务的过期时间
bool _compare(int lhs, int rhs);
//向下调整算法,每次删除一个节点就要向下调整
void _shiftDown(int parent);
//向上调整算法,每添加一个数都要调用向上调整算法,保证根节点为最小节点
void _shiftUp(int child);
//删除的子函数
void _delNode(TimerNode *node);
void resign(int pos);
private:
//数组中存储任务节点
vector<TimerNode *> _heap;
//存储值和响应节点的映射关系
map<int, TimerNode *> _map;
//任务的个数,注意不是_heap的size
int _count = 0;
};具体的实现以及测试为:
#pragma once
#include <vector>
#include <map>
using namespace std;
typedef void (*TimerHandler)(struct TimerNode *node);
//获取系统时间,单位是毫秒
static uint32_t current_time()
{
uint32_t t;
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti);
t = (uint32_t)ti.tv_sec * 1000;
t += ti.tv_nsec / 1000000;
return t;
}
struct TimerNode
{
//该任务在最小堆中的下标位置
int idx = 0;
//该任务是第几号任务
int id = 0;
unsigned int expire = 0;
//回调函数
TimerHandler cb = NULL;
};
class MinHeapTimer
{
public:
MinHeapTimer()
{
_heap.clear();
_map.clear();
}
int Count()
{
return ++_count;
}
//加入任务,expire为该任务的失效时间,expire过后就要执行回调函数cb
int AddTimer(uint32_t expire, TimerHandler cb)
{
int64_t timeout = current_time() + expire;
TimerNode *node = new TimerNode;
int id = Count();
node->id = id;
node->expire = timeout;
node->cb = cb;
node->idx = (int)_heap.size();
_heap.push_back(node);
_shiftUp((int)_heap.size() - 1);
_map.insert(make_pair(id, node));
return id;
}
//删除一个任务
bool DelTimer(int id)
{
auto iter = _map.find(id);
if (iter == _map.end())
return false;
_delNode(iter->second);
return true;
}
//获取一个任务
void ExpireTimer()
{
if (_heap.empty())
{
return;
}
//获取当前时间
uint32_t now = current_time();
while (!_heap.empty())
{
//获取最近的一个任务
TimerNode *node = _heap.front();
//当最近一个任务的时间大于当前时间,说明没有任务要执行
if (now < node->expire)
{
break;
}
//遍历一下堆,这一步可以不加
for (int i = 0; i < _heap.size(); i++)
{
std::cout << "touch idx: " << _heap[i]->idx
<< " id: " << _heap[i]->id << " expire: "
<< _heap[i]->expire << std::endl;
}
//执行最近任务的回调函数
if (node->cb)
{
node->cb(node);
}
//执行完就删掉这个任务
_delNode(node);
}
}
private:
//用于比较两个任务的过期时间
bool _compare(int lhs, int rhs)
{
return _heap[lhs]->expire < _heap[rhs]->expire;
}
//向下调整算法,每次删除一个节点就要向下调整
void _shiftDown(int parent)
{
int child = parent * 2 + 1;
while (child < _heap.size() - 1)
{
if (child + 1 < _heap.size() - 1 && !_compare(child, child + 1))
{
child++;
}
if (!_compare(parent, child))
{
std::swap(_heap[parent], _heap[child]);
_heap[parent]->idx = parent;
_heap[child]->idx = child;
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
//向上调整算法,每添加一个数都要调用向上调整算法,保证根节点为最小节点
void _shiftUp(int child)
{
int parent = (child - 1) / 2;
while (child > 0)
{
if (!_compare(parent, child))
{
std::swap(_heap[parent], _heap[child]);
_heap[parent]->idx = parent;
_heap[child]->idx = child;
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
//删除的子函数
void _delNode(TimerNode *node)
{
int last = (int)_heap.size() - 1;
int idx = node->idx;
if (idx != last)
{
std::swap(_heap[idx], _heap[last]);
_heap[idx]->idx = idx;
resign(idx);
}
_heap.pop_back();
_map.erase(node->id);
delete node;
}
void resign(int pos)
{
//向上调整和向下调整只会发生一个
_shiftDown(pos);
_shiftUp(pos);
}
private:
//数组中存储任务节点
vector<TimerNode *> _heap;
//存储值和响应节点的映射关系
map<int, TimerNode *> _map;
//任务的个数,注意不是_heap的size
int _count = 0;
};#include <time.h>
#include <unistd.h>
#include <iOStream>
#include "minheap.h"
void print_hello(TimerNode *te)
{
std::cout << "hello world time = " << te->idx << "\t" << te->id << "\t" << current_time() << std::endl;
}
int main()
{
MinHeapTimer mht;
//一号任务,立刻执行
mht.AddTimer(0, print_hello);
//二号任务,一秒后执行
mht.AddTimer(1000, print_hello);
mht.AddTimer(7000, print_hello);
mht.AddTimer(2000, print_hello);
mht.AddTimer(9000, print_hello);
mht.AddTimer(10000, print_hello);
mht.AddTimer(6000, print_hello);
mht.AddTimer(3000, print_hello);
while (1)
{
mht.ExpireTimer();
// usleep(10000);
sleep(1);
}
return 0;
}
上面的定时器在任务数量很多时,效率会很低,因为我们需要用最小堆来维护这些任务,并且每删除一个任务,都要进行调整。其主要原因是我们不知道其他任务什么时候执行,所以我们只能进行调整,将最近的任务放到堆顶。
如果我们能够向哈希桶那样,将要执行的任务形成链表,挂到要执行的位置,当时间走到那个位置的时候,就执行这些任务,效率岂不是更高?
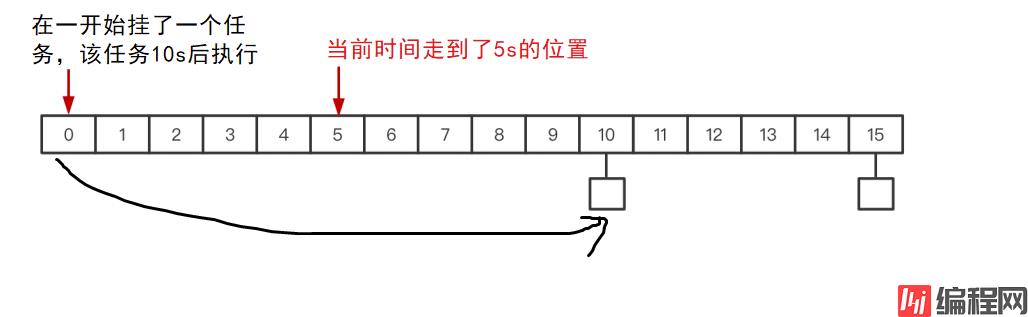
客户端每 5 秒钟发送⼼跳包;服务端若 10 秒内没收到⼼跳数据,则清除连接。
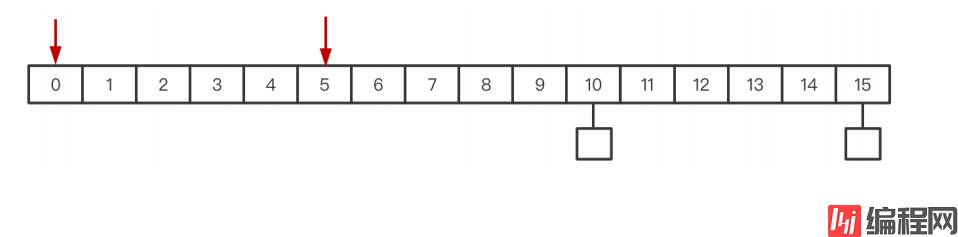
考虑到正常情况下 5 秒钟发送⼀次⼼跳包,10 秒才检测⼀次,如下图到索引为 10 的时候并不能踢掉连接;所以需要每收到⼀次⼼跳包则 used++ ,每检测⼀次 used-- ;当检测到used == 0 则踢掉连接;
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <stdint.h>
#include <sys/time.h>
#include <time.h>
#define MAX_CONN ((1 << 16) - 1)
//连接的节点,用来记录心跳包发送的次数
typedef struct conn_node
{
struct conn_node *next;
//引用计数的次数,当used==0,相当于自动销毁
uint8_t used;
int id;
} conn_node_t;
//用数组记录所有的连接
static conn_node_t nodes[MAX_CONN] = {0};
static uint32_t iter = 0;
//获取一个空的连接节点
conn_node_t *get_node()
{
iter++;
while (nodes[iter & MAX_CONN].used > 0)
{
iter++;
}
return &nodes[iter];
}
//哈希桶的个数
#define TW_SIZE 16
//检测心跳包的延迟时间,由于哈希桶的个数有限,所以心跳包发送时间不能够超过6
#define EXPIRE 10
//取余操作
#define TW_MASK (TW_SIZE - 1)
static uint32_t tick = 0;
//哈希桶
typedef struct link_list
{
conn_node_t head;
//一个tail,能够进行快速插入
conn_node_t *tail;
} link_list_t;
//添加连接
void add_conn(link_list_t *tw, conn_node_t *node, int delay)
{
//获取对应的哈希桶
link_list_t *list = &tw[(tick + EXPIRE + delay) & TW_MASK];
list->tail->next = node;
list->tail = node;
node->next = NULL;
node->used++;
}
//清楚这个哈希桶
void link_clear(link_list_t *list)
{
list->head.next = NULL;
list->tail = &(list->head);
}
//检测哈希桶
void check_conn(link_list_t *tw)
{
int32_t itick = tick;
tick++;
//取到对应哈希桶的链表
link_list_t *list = &tw[itick & TW_MASK];
//检测哈希桶对应的链表
conn_node_t *current = list->head.next;
while (current)
{
conn_node_t *temp = current;
current = current->next;
temp->used--;
if (temp->used == 0)
{
printf("连接:%d 断开\n", temp->id);
temp->next = NULL;
continue;
}
printf("这个链接:%d 心跳包还剩:%d个需要检测\n", temp->id, temp->used);
}
link_clear(list);
}
//获取时间,单位是s
static time_t current_time()
{
time_t t;
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti);
t = (time_t)ti.tv_sec;
return t;
}
int main()
{
memset(nodes, 0, MAX_CONN * sizeof(conn_node_t));
// init link list
link_list_t tw[TW_SIZE];
memset(tw, 0, TW_SIZE * sizeof(link_list_t));
for (int i = 0; i < TW_SIZE; i++)
{
link_clear(&tw[i]);
}
// 第一个连接对应的心跳包,在0和5时进行发送
//所以会在10s和15s时进行检测,15s时把该连接断开
{
conn_node_t *node = get_node();
node->id = 10001;
add_conn(tw, node, 0);
add_conn(tw, node, 5);
}
//第二个连接发送的心跳包,在第10s时进行检测
{
conn_node_t *node = get_node();
node->id = 10002;
add_conn(tw, node, 0);
}
//第二个连接发送的心跳包,在第13s时检测
{
conn_node_t *node = get_node();
node->id = 10003;
add_conn(tw, node, 3);
}
time_t start = current_time();
while (1)
{
time_t now = current_time();
if (now - start > 0)
{
for (int i = 0; i < now - start; i++)
check_conn(tw);
start = now;
printf("在第%d秒时检测,此时机器时间:%d\n", tick, now);
}
}
return 0;
}
上面的时间轮受哈希桶大小和延迟10s收到心跳包的影响,只能在[0,6]秒内发送数据心跳包,如果想要延迟长时间,则需要扩大哈希桶的大小。
如果我们不发送心跳包,而是改成在若干秒后执行一个任务,比如50s后执行任务,但哈希桶大小只有16,我们可以在任务节点中增加一个参数round,用来记录需要走多少遍哈希桶,比如50s,对应到大小为16的哈希桶则round=3,idx=2。
不过这样做,在check_conn取任务时就不能够把整个链表都取出来,而是需要取出round==0的任务。
typedef struct node
{
struct conn_node *next;
//需要走多少轮哈希桶,当round==0时,则说明需要执行这个任务
int round;
int id;
} node_t;这样做能解决时间轮刻度范围过大造成的空间浪费,但是却带来了另一个问题:时间轮每次都需要遍历任务列表,耗时增加,当时间轮刻度粒度很小(秒级甚至毫秒级),任务列表又特别长时,这种遍历的办法是不可接受的。
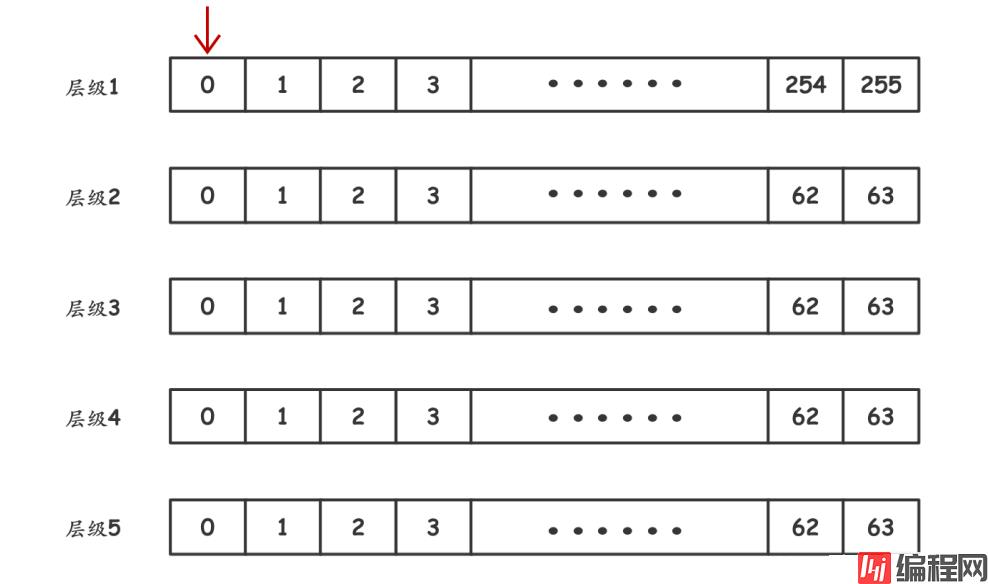
参照时钟表盘的运转规律,可以将定时任务根据触发的紧急程度,分布到不同层级的时间轮中;
假设时间精度为 10ms ;在第 1 层级每 10ms 移动⼀格;每移动⼀格执⾏该格⼦当中所有的定时任务;
当第 1 层指针从 255 格开始移动,此时层级 2 移动⼀格;层级 2 移动⼀格的⾏为定义为,将该格当中的定时任务重新映射到层级 1 当中;同理,层级 2 当中从 63 格开始移动,层级 3 格⼦中的定时任务重新映射到层级 2 ; 以此类推层级 4 往层级 3 映射,层级 5 往层级 4 映射。
只有任务在第一层时才会被执行,其他层都是将任务重新映射到上一层。
timewheel.h:
#pragma once
#include <stdint.h>
#define TIME_NEAR_SHIFT 8
#define TIME_NEAR (1 << TIME_NEAR_SHIFT)
#define TIME_LEVEL_SHIFT 6
#define TIME_LEVEL (1 << TIME_LEVEL_SHIFT)
#define TIME_NEAR_MASK (TIME_NEAR - 1)
#define TIME_LEVEL_MASK (TIME_LEVEL - 1)
typedef struct timer_node timer_node_t;
typedef void (*handler_pt)(struct timer_node *node);
struct timer_node
{
struct timer_node *next;
uint32_t expire; //时间
handler_pt callback; //回调函数
uint8_t cancel; //是否删除
int id; // 此时携带参数
};
timer_node_t *add_timer(int time, handler_pt func, int threadid);
void expire_timer(void);
void del_timer(timer_node_t *node);
void init_timer(void);
void clear_timer();spinlock.h:
#pragma once
struct spinlock
{
int lock;
};
void spinlock_init(struct spinlock *lock)
{
lock->lock = 0;
}
void spinlock_lock(struct spinlock *lock)
{
while (__sync_lock_test_and_set(&lock->lock, 1))
{
}
}
int spinlock_trylock(struct spinlock *lock)
{
return __sync_lock_test_and_set(&lock->lock, 1) == 0;
}
void spinlock_unlock(struct spinlock *lock)
{
__sync_lock_release(&lock->lock);
}
void spinlock_destroy(struct spinlock *lock)
{
(void)lock;
}timewheel.cpp:
#include "spinlock.h"
#include "timewheel.h"
#include <string.h>
#include <stddef.h>
#include <stdlib.h>
#include <time.h>
typedef struct link_list
{
timer_node_t head;
timer_node_t *tail;
} link_list_t;
//多级时间轮
typedef struct timer
{
//第一级
link_list_t near[TIME_NEAR];
// 2-4级
link_list_t t[4][TIME_LEVEL];
struct spinlock lock;
uint32_t time;
uint64_t current;
uint64_t current_point;
} s_timer_t;
static s_timer_t *TI = NULL;
timer_node_t *link_clear(link_list_t *list)
{
timer_node_t *ret = list->head.next;
list->head.next = 0;
list->tail = &(list->head);
return ret;
}
//链接一个节点
void link(link_list_t *list, timer_node_t *node)
{
list->tail->next = node;
list->tail = node;
node->next = 0;
}
void add_node(s_timer_t *T, timer_node_t *node)
{
uint32_t time = node->expire;
uint32_t current_time = T->time;
uint32_t msec = time - current_time;
//根据时间
if (msec < TIME_NEAR)
{ //[0, 0x100)
link(&T->near[time & TIME_NEAR_MASK], node);
}
else if (msec < (1 << (TIME_NEAR_SHIFT + TIME_LEVEL_SHIFT)))
{ //[0x100, 0x4000)
link(&T->t[0][((time >> TIME_NEAR_SHIFT) & TIME_LEVEL_MASK)], node);
}
else if (msec < (1 << (TIME_NEAR_SHIFT + 2 * TIME_LEVEL_SHIFT)))
{ //[0x4000, 0x100000)
link(&T->t[1][((time >> (TIME_NEAR_SHIFT + TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)], node);
}
else if (msec < (1 << (TIME_NEAR_SHIFT + 3 * TIME_LEVEL_SHIFT)))
{ //[0x100000, 0x4000000)
link(&T->t[2][((time >> (TIME_NEAR_SHIFT + 2 * TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)], node);
}
else
{ //[0x4000000, 0xffffffff]
link(&T->t[3][((time >> (TIME_NEAR_SHIFT + 3 * TIME_LEVEL_SHIFT)) & TIME_LEVEL_MASK)], node);
}
}
//增加事件
timer_node_t *add_timer(int time, handler_pt func, int threadid)
{
timer_node_t *node = (timer_node_t *)malloc(sizeof(*node));
spinlock_lock(&TI->lock);
node->expire = time + TI->time; // 每10ms加1 0
node->callback = func;
node->id = threadid;
if (time <= 0)
{
node->callback(node);
free(node);
spinlock_unlock(&TI->lock);
return NULL;
}
add_node(TI, node);
spinlock_unlock(&TI->lock);
return node;
}
void move_list(s_timer_t *T, int level, int idx)
{
timer_node_t *current = link_clear(&T->t[level][idx]);
while (current)
{
timer_node_t *temp = current->next;
add_node(T, current);
current = temp;
}
}
void timer_shift(s_timer_t *T)
{
int mask = TIME_NEAR;
uint32_t ct = ++T->time;
if (ct == 0)
{
move_list(T, 3, 0);
}
else
{
// ct / 256
uint32_t time = ct >> TIME_NEAR_SHIFT;
int i = 0;
// ct % 256 == 0
while ((ct & (mask - 1)) == 0)
{
int idx = time & TIME_LEVEL_MASK;
if (idx != 0)
{
move_list(T, i, idx);
break;
}
mask <<= TIME_LEVEL_SHIFT;
time >>= TIME_LEVEL_SHIFT;
++i;
}
}
}
void dispatch_list(timer_node_t *current)
{
do
{
timer_node_t *temp = current;
current = current->next;
if (temp->cancel == 0)
temp->callback(temp);
free(temp);
} while (current);
}
void timer_execute(s_timer_t *T)
{
int idx = T->time & TIME_NEAR_MASK;
while (T->near[idx].head.next)
{
timer_node_t *current = link_clear(&T->near[idx]);
spinlock_unlock(&T->lock);
dispatch_list(current);
spinlock_lock(&T->lock);
}
}
void timer_update(s_timer_t *T)
{
spinlock_lock(&T->lock);
timer_execute(T);
timer_shift(T);
timer_execute(T);
spinlock_unlock(&T->lock);
}
void del_timer(timer_node_t *node)
{
node->cancel = 1;
}
s_timer_t *timer_create_timer()
{
s_timer_t *r = (s_timer_t *)malloc(sizeof(s_timer_t));
memset(r, 0, sizeof(*r));
int i, j;
for (i = 0; i < TIME_NEAR; i++)
{
link_clear(&r->near[i]);
}
for (i = 0; i < 4; i++)
{
for (j = 0; j < TIME_LEVEL; j++)
{
link_clear(&r->t[i][j]);
}
}
spinlock_init(&r->lock);
r->current = 0;
return r;
}
uint64_t gettime()
{
uint64_t t;
struct timespec ti;
clock_gettime(CLOCK_MONOTONIC, &ti);
t = (uint64_t)ti.tv_sec * 100;
t += ti.tv_nsec / 10000000;
return t;
}
void expire_timer(void)
{
uint64_t cp = gettime();
if (cp != TI->current_point)
{
uint32_t diff = (uint32_t)(cp - TI->current_point);
TI->current_point = cp;
int i;
for (i = 0; i < diff; i++)
{
timer_update(TI);
}
}
}
void init_timer(void)
{
TI = timer_create_timer();
TI->current_point = gettime();
}
void clear_timer()
{
int i, j;
for (i = 0; i < TIME_NEAR; i++)
{
link_list_t *list = &TI->near[i];
timer_node_t *current = list->head.next;
while (current)
{
timer_node_t *temp = current;
current = current->next;
free(temp);
}
link_clear(&TI->near[i]);
}
for (i = 0; i < 4; i++)
{
for (j = 0; j < TIME_LEVEL; j++)
{
link_list_t *list = &TI->t[i][j];
timer_node_t *current = list->head.next;
while (current)
{
timer_node_t *temp = current;
current = current->next;
free(temp);
}
link_clear(&TI->t[i][j]);
}
}
}tw-timer.cpp:
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <stdlib.h>
#include "timewheel.h"
struct context
{
int quit;
int thread;
};
struct thread_param
{
struct context *ctx;
int id;
};
static struct context ctx = {0};
void do_timer(timer_node_t *node)
{
printf("timer expired:%d - thread-id:%d\n", node->expire, node->id);
}
void *thread_worker(void *p)
{
struct thread_param *tp = (struct thread_param *)p;
int id = tp->id;
struct context *ctx = tp->ctx;
while (!ctx->quit)
{
int expire = rand() % 200;
add_timer(expire, do_timer, id);
usleep(expire * (10 - 1) * 1000);
}
printf("thread_worker:%d exit!\n", id);
return NULL;
}
void do_quit(timer_node_t *node)
{
ctx.quit = 1;
}
int main()
{
srand(time(NULL));
ctx.thread = 8;
pthread_t pid[ctx.thread];
init_timer();
add_timer(6000, do_quit, 100);
struct thread_param task_thread_p[ctx.thread];
int i;
for (i = 0; i < ctx.thread; i++)
{
task_thread_p[i].id = i;
task_thread_p[i].ctx = &ctx;
if (pthread_create(&pid[i], NULL, thread_worker, &task_thread_p[i]))
{
fprintf(stderr, "create thread failed\n");
exit(1);
}
}
while (!ctx.quit)
{
expire_timer();
usleep(2500);
}
clear_timer();
for (i = 0; i < ctx.thread; i++)
{
pthread_join(pid[i], NULL);
}
printf("all thread is closed\n");
return 0;
}
到此这篇关于c++定时器实现和时间轮介绍的文章就介绍,到这了,更多相关C++定时器 内容请搜索编程网以前的文章或继续浏览下面的相关文章希望大家以后多多支持编程网!
--结束END--
本文标题: C++定时器实现和时间轮介绍
本文链接: https://lsjlt.com/news/167667.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
2024-03-01
2024-03-01
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作

0